the piezoelectric motor, mostly used on optical zoom of cameras for exemple, it is very small and works following the piezoelectricity principle. This project aim is to create a experimental test bench in order to understand how it is working and controlled and how it is implemented in a displacement control system.
During the education, are designed for DC motors, brushless motors, linear motors moving, the stepping motors, but one that is widely used and little known is the piezoelectric motor. To better understand the technology, we have here studied the motor.
Piezoelectric motors size comparison
Physical principle
The distortion caused by the compression force generates a separation of the centers of positive and negative charges, hence the appearance of an electric field. This principle wich is reversible, that is used.
Molecular representation
- The power of two plates separated by a distance d leads to the appearance of an electric field
- If the input signal changes, so the field E changes and goes in vibration at the same frequency than the signal
- The material is in resonance mode and it is deforming of few microns
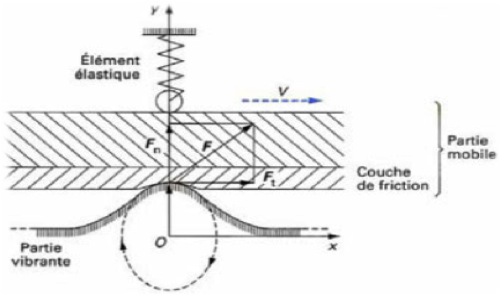
Schematic plan
We excite the ceramic plates with a PWM which the excitation frequency corresponds to a self mode of stator bending.
The combination of two sinusoidal vibrations in quadrature in time and space creates a propagaging wave in the stator causing a displacement of the rotor causing by friction.
Acting on the excitation frequency of the PWM, we can control the engine speed.
Characteristics
Technical specifications
Tis motor have the particularity to get the following characteristics:
Avantages
Disadvantages
Engine friction: no mechanical failure in the event of blocking
High holding torque (compared to its weight)
noiseless operating
High torque at low speed
Very compact
Volts autopilot needed (complex electric power)
High wear ( low lifetime).
Final results
After the model creation, here is the final model retained for the motor studies:
Model construction
Calulation show we can control the displacement with a precision of 7μm.
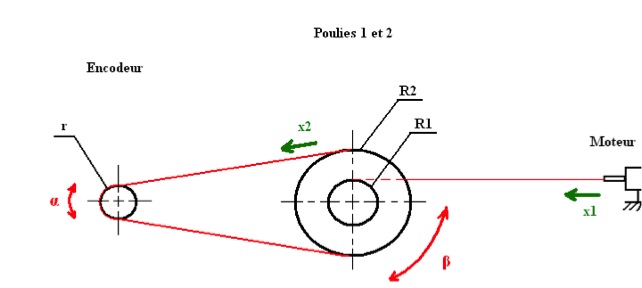
Model assembly
Synthesis of carried out tasks:
- Model construction
- Motor functionment in a closed loop
Perspectives:
- PID settings for an optimal functionment
- Industrial model manufacturing